一、什么是PID 控制算法
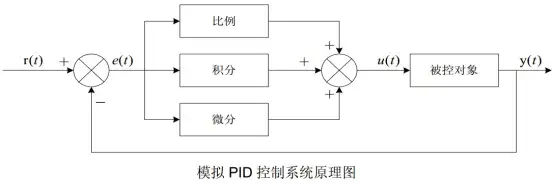
PID 控制算法是比例(Proportional)- 积分(Integral)- 微分(Derivative) 控制的简称,是工业控制、嵌入式系统中最经典、应用最广泛的闭环控制算法。它的核心思想是通过偏差(设定值与实际值的差值)的比例、积分、微分三个环节的加权组合,计算出控制量,使系统的实际输出快速、稳定地逼近设定值。
二、核心公式(连续域)

比例环节(P)
- 核心作用:即时响应偏差,偏差越大,控制量越大。
- 缺点:仅用 P 控制会存在稳态误差(系统稳定后,实际值与设定值仍有差距);Kp过大会导致系统震荡。
积分环节(I)
- 核心作用:累积历史偏差,只要存在偏差,积分项就会持续增大,直到偏差为 0,从而消除稳态误差。
- 缺点:积分累积会导致系统超调(实际值超过设定值),甚至震荡;系统启动初期积分饱和会影响响应速度。
微分环节(D)
- 核心作用:预测偏差变化趋势,偏差变化越快,微分项输出越大,提前抑制偏差的变化(类似 "阻尼" 作用)。
- 缺点:对噪声敏感(传感器的微小波动会被放大);Kd过大会导致系统响应迟缓。
离散化公式(嵌入式系统常用)
嵌入式 MCU 是离散采样系统 ,无法直接计算连续的积分和微分,需要将上述的连续域PID 公式离散化 ,用数值积分 和数值微分 替代连续运算,得到离散 PID 公式。
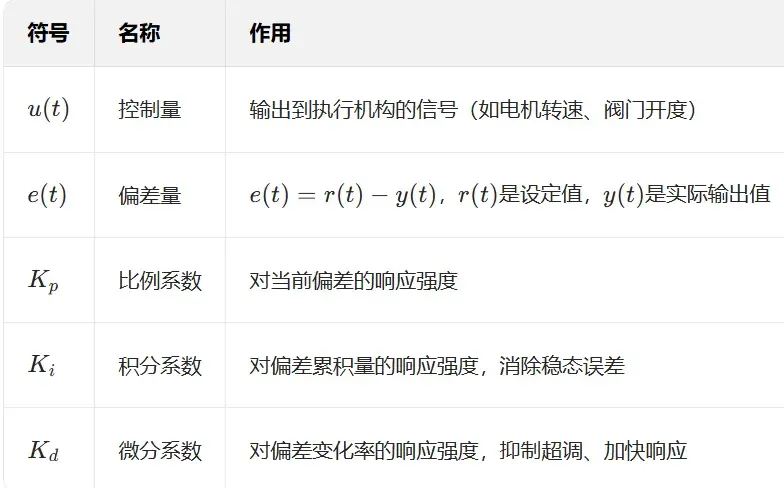
设系统采样周期为 Ts,第 k 次采样时刻的偏差为 e(k)=r(k)-y(k)(设定值-实际采样值),则离散 PID 有两种常用形式:
- 位置式PID

特点:输出 u(k) 是绝对控制量,也就是阀门开度(如电机的目标占空比、舵机的目标角度)。
C语言代码(通用):
typedef struct {
float kp; // 比例系数
float ki; // 积分系数
float kd; // 微分系数
float set_point; // 设定值
float feedback; // 反馈值
float error; // 当前误差 (set_point - feedback)
float error_sum; // 误差积分和(防止积分饱和)
float error_prev; // 上一次误差(微分用)
float output_max; // 输出最大值
float output_min; // 输出最小值
} PID_Positional;
/**
- @brief 位置式 PID 核心计算(无初始化函数,参数需外部赋值)
- @param pid: 位置式 PID 结构体指针
- @param set_point: 设定值
- @param feedback: 反馈值
- @return 位置式 PID 输出值
*/
float PID_Positional_Calc(PID_Positional *pid, float set_point, float feedback) {
if (pid == NULL) return 0.0f;
// 更新设定值和反馈值
pid->set_point = set_point;
pid->feedback = feedback;
// 计算当前误差
pid->error = pid->set_point - pid->feedback;
// 积分项(带积分限幅,防止积分饱和)
pid->error_sum += pid->error;
// 积分限幅:根据输出限幅和 ki 动态约束(也可直接赋值固定值)
float integral_max = (pid->output_max / pid->ki) * 0.8f;
float integral_min = (pid->output_min / pid->ki) * 0.8f;
if (pid->error_sum > integral_max) pid->error_sum = integral_max;
if (pid->error_sum < integral_min) pid->error_sum = integral_min;
// 位置式 PID 核心公式
float output = pid->kp * pid->error + // 比例项
pid->ki * pid->error_sum + // 积分项
pid->kd * (pid->error - pid->error_prev); // 微分项
// 输出限幅
if (output > pid->output_max) output = pid->output_max;
if (output < pid->output_min) output = pid->output_min;
// 更新上一次误差
pid->error_prev = pid->error;
return output;
}2.增量式 PID
计算相邻两次控制量的差值 Δ u(k),公式推导:
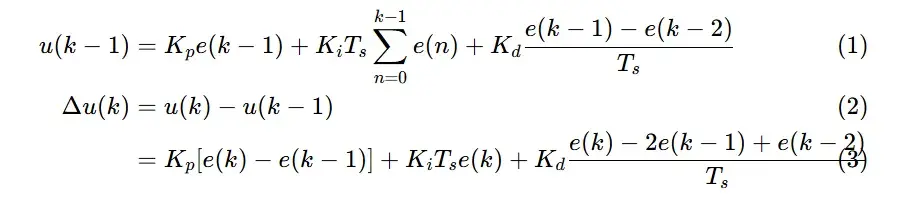
特点:输出Δ u(k) 是控制量增量,只需叠加到上一次的控制量上(在上一次的控制输出上进行加减):u(k)=u(k-1)+Δ u(k)。
C语言代码(通用):
typedef struct {
float kp; // 比例系数
float ki; // 积分系数
float kd; // 微分系数
float set_point; // 设定值
float feedback; // 反馈值
float error; // 当前误差 (set_point - feedback)
float error_prev1; // 前1次误差
float error_prev2; // 前2次误差
float output_inc; // 增量输出
float output_max; // 输出最大值(用于增量限幅)
float output_min; // 输出最小值(用于增量限幅)
} PID_Incremental;
/**
@brief 增量式 PID 核心计算(无初始化函数,参数需外部赋值)
@param pid: 增量式 PID 结构体指针
@param set_point: 设定值
@param feedback: 反馈值
@return 增量式 PID 输出增量
*/
float PID_Incremental_Calc(PID_Incremental *pid, float set_point, float feedback) {
if (pid == NULL) return 0.0f;
// 更新设定值和反馈值
pid->set_point = set_point;
pid->feedback = feedback;
// 计算当前误差
pid->error = pid->set_point - pid->feedback;
// 增量式 PID 核心公式
pid->output_inc = pid->kp * (pid->error - pid->error_prev1) + // 比例增量
pid->ki * pid->error + // 积分增量
pid->kd * (pid->error - 2*pid->error_prev1 + pid->error_prev2); // 微分增量
// 增量限幅(避免单次增量过大)
float inc_max = (pid->output_max - pid->output_min) / 2;
if (pid->output_inc > inc_max) pid->output_inc = inc_max;
if (pid->output_inc < -inc_max) pid->output_inc = -inc_max;
// 更新误差历史(前2次 → 前1次,前1次 → 当前)
pid->error_prev2 = pid->error_prev1;
pid->error_prev1 = pid->error;
return pid->output_inc;
}三、嵌入式系统如何使用PID控制算法?
建立闭环反馈
- 明确被控对象
被控对象:比如温度、机器人关节、直流电机转速等;
- 选择合适的采样周期对被控变量进行采样
采集能反应被控对象当前状态的信号
采样周期的选择依据:
- 香农采样定理:采样频率至少是被控对象最高变化频率的 2 倍,避免信号混叠;
- 被控对象响应速度:比如直流电机响应速度为 ms 级,采样周期设置为1~10ms ;温度这类慢响应对象,采样周期设置为1~5s;
由此我们得到了被控对象温度的实际温度
- PID运算出输出量
将目标值和采样值送入PID公式进行计算
需要注意:
- 输出到执行器
将PID公式运算出来的结果作用到输出执行器
需要注意:
- 数值限幅:运算后必须将输出量限制在执行器的有效范围(比如 PWM 占空比 0~100%、DAC 输出 0~4095),避免输出超限损坏执行器;
PID参数的调参(Kp,Ki,Kd)
建立好闭环反馈环节后就可以对PID参数进行整定了,我们实际最多使用的是经验试凑法,这里只分享试凑法:
试凑法的核心逻辑:先调 P,再调 I,最后调 D,每次只改一个参数,观察系统响应,逐步逼近最优值。
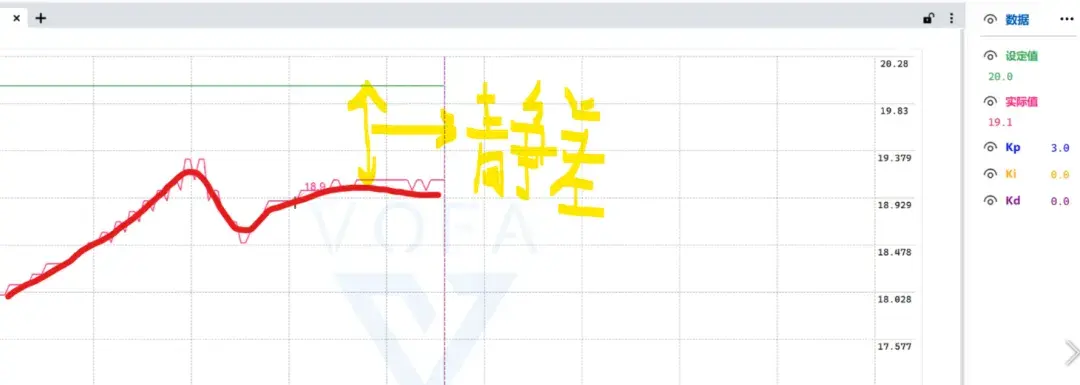
- 只调比例环节(P),关闭 I 和 D
Ki=0,Kd=0,K_p 从 0 开始缓慢增大;直到响应较快,实际值快速接近设定值,轻微震荡后稳定,稳态误差较小

(此时可能会有静态误差,即输出一直达不到目标值这种情况)
- Kp过大-->系统可能会震荡
- Kp过小-->系统响应较慢, 可能达不到目标值
- 加入积分环节(I),消除稳态误差
为了消除静态误差,加入积分环节,在Kp已有的基础上,Kd=0,加入Ki,Ki 从 0 开始缓慢增大,直到系统能消除静态误差,并且不发生震荡
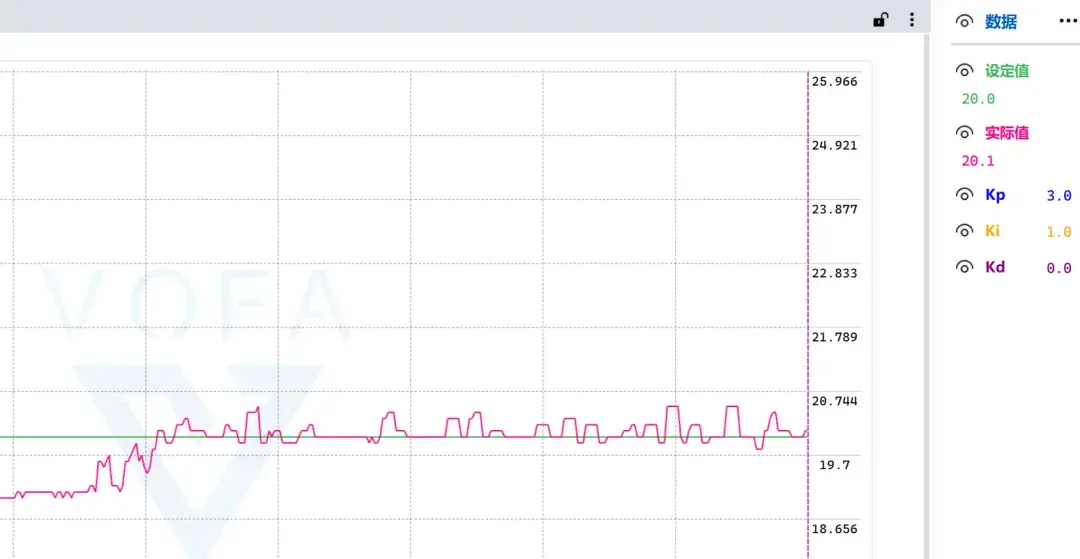
(要注意抗积分饱和,不然系统极易发生震荡)
- Ki过大-->系统可能会震荡
- Ki过小-->系统依旧有静差
- 加入微分环节(D),加快响应
若已达到预期的控制效果可不引入微分环节。
若未达到预期的控制效果,可以在前面的基础上使Kid从 0 开始缓慢增大,直到超调大幅减小,响应速度基本不变,系统快速稳定。