目录
1.摘要
针对自主移动机器人在复杂真实环境中运动规划效率与最优性难以兼顾的问题,本文提出了一种融合自然启发式优化思想的全局运动规划方法------GLWOA-RRT*,该方法将快速随机探索树优化算法(RRT *)与鲸鱼优化算法(WOA)相结合,利用 RRT * 的高效空间探索能力生成高质量初始路径,并借助 WOA 在全局搜索、快速收敛及避免局部最优方面的优势,对机器人运动轨迹进行进一步优化。GLWOA-RRT * 通过将群体中每个智能体映射为机器人的运动行为,实现对安全且最优运动规划问题的全局求解。
2.自然启发的运动规划
GLWOA-RRT* 通过引入鲸鱼优化算法 (WOA)对 RRT* 生成的初始路径进行优化,以提升运动规划质量,该方法将每个群体智能体编码为一条由多个配置点组成的路径向量。为兼顾初始解质量与种群多样性,以 RRT* 路径作为基准个体,其余路径在各配置点处于半径 R R R的邻域内随机扰动生成。随后,WOA 对路径进行迭代优化,并在路径长度最小化与无碰撞安全约束之间寻求最优折中,最终选取性能最优的路径作为规划结果。
f G L = λ c f ( λ l ∑ i ∥ η i + 1 − η i ∥ ) f^{GL}=\lambda_{cf}(\lambda_l\sum_i\|\eta_{i+1}-\eta_i\|) fGL=λcf(λli∑∥ηi+1−ηi∥)
其中, λ c f \lambda_{cf} λcf 与 λ l \lambda_{l} λl 分别为路径安全性与路径代价的权重系数, η i \eta_{i} ηi 与 η i + 1 \eta_{i+1} ηi+1 表示路径 II 上相邻的两个节点。
λ c f = { 1 i f Π ( g ) is collision-free ∞ o t h e r w i s e \lambda_{cf}=\begin{cases}1&\mathrm{if}\Pi(g)\text{is collision-free}\\\infty&\mathrm{otherwise}&\end{cases} λcf={1∞ifΠ(g)is collision-freeotherwise
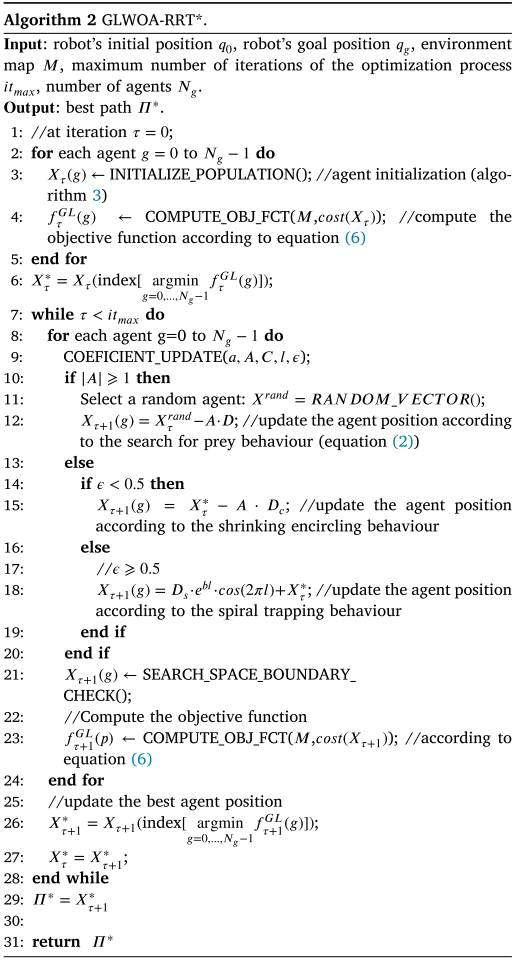
GLWOA-RRT* 以初始位姿 q 0 q_0 q0、目标位姿 q g q_g qg及环境地图 M M M为输入,在给定种群规模与迭代次数下搜索最优路径 Π ∗ \Pi^* Π∗。算法首先利用 RRT* 生成初始路径,并在其邻域内随机初始化种群,以保证解质量与多样性。随后,通过目标函数评估路径的安全性与代价,并选取当前最优解引导搜索。
3.结果展示
4.参考文献
1 Bouraine S, Bellalia Y, Chaabeni I, et al. When robots learn from nature: GLWOA-RRT*, a nature-inspired motion planning approachJ. Swarm and Evolutionary Computation, 2025, 98: 102062.
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx