目录
1.摘要
协同任务分配是无人机领域的重要研究问题,针对复杂约束条件下异构无人机的协同任务分配,本文提出了一种能量学习超启发式(EL-HH)算法。该方法首先建立数学模型,对任务场景、约束条件和优化目标进行统一描述;随后设计了三层方案编码结构(任务序列、无人机序列与等待时间),并引入基于能量学习的超启发式策略,自适应调控多种优化算子的选择与应用,从而充分探索解空间。同时,通过任务顺序与时间调整策略,对任务执行过程进行动态优化。仿真与实验结果表明,所提出的 EL-HH 算法在求解复杂约束下的异构无人机协同任务分配问题中具有良好的有效性与可行性。
2.问题描述
协作任务分配场景
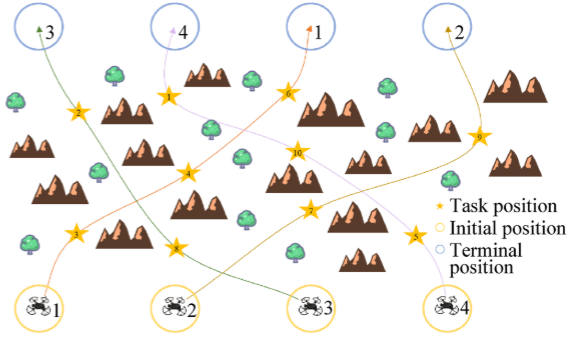
协同任务分配问题是在复杂约束下协调多架异构无人机高效完成多种任务的过程。受载荷差异和任务多样性影响,该问题需同时优化任务完成度、飞行时间等多重目标,属于难以求解的非凸组合优化问题,关于协作任务分配问题的已知信息可以表示为:
Γ = { O , T , C , U } \Gamma=\{\mathscr{O},T,C,U\} Γ={O,T,C,U}
{ O = { M a p , T h e r a t s } T = { T 1 , T 2 , . . . , T N T } C = { C 1 , C 2 , . . . , C N T } U = { U 1 , U 2 , . . . , U N U } \left\{\begin{array}{l}\mathcal{O}=\{Map,Therats\}\\T=\{T_1,T_2,...,T_{N_T}\}\\C=\{C_1,C_2,...,C_{N_T}\}\\U=\{U_1,U_2,...,U_{N_U}\}\end{array}\right. ⎩ ⎨ ⎧O={Map,Therats}T={T1,T2,...,TNT}C={C1,C2,...,CNT}U={U1,U2,...,UNU}
其中, O O O表示障碍物与威胁的集合,Map 表示障碍地图,Threats 表示威胁集合, T T T为任务集合, N T N_T NT为任务数量, C C C为任务价值集合, U U U为无人机集合, N U N_U NU为无人机数量; T i T_i Ti 表示第 i i i个任务, U j U_j Uj表示第 j j j架无人机。
目标函数通过加权融合任务完成与能耗收益,并对载荷、飞行时间和时间窗等约束违背情况施加惩罚,在收益最大化与成本控制之间实现平衡:
J s u m ( X ) = α 1 J t a s k + α 2 J e n e r g y − α 3 J l o a d − α 4 J t i m e − α 5 J w i n d o w J_{\mathrm{sum}}(X)=\alpha_1J_{\mathrm{task}}+\alpha_2J_{\mathrm{energy}}-\alpha_3J_{\mathrm{load}}-\alpha_4J_{\mathrm{time}}-\alpha_5J_{\mathrm{window}} Jsum(X)=α1Jtask+α2Jenergy−α3Jload−α4Jtime−α5Jwindow
3.EL-HH算法
三层编码方案
三层编码将协同任务分配表示为任务顺序、无人机分配和等待时间三部分,统一刻画任务执行次序、无人机指派及时间调度。
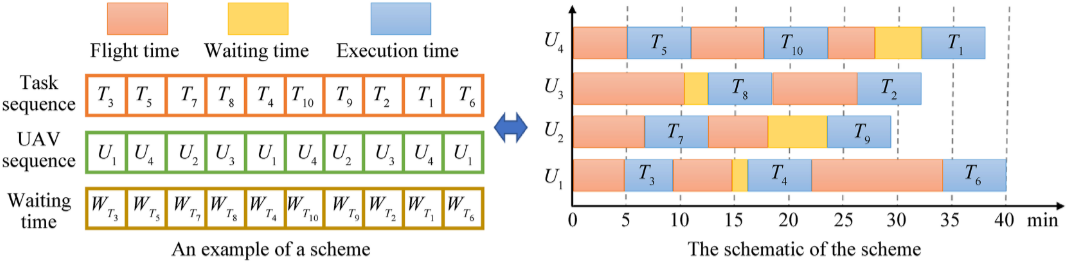
X = X t a s k s , X U A H s , W t i m e = \[ T 3 , T 1 , T 4 , T 2 , ⋯ , T N r , U 2 , U 1 , U 3 , U 2 , ⋯ , U N 0 , W T 3 , W T 1 , W T 4 , W T 2 , ⋯ , W T N r ] X=X_{\\mathrm{tasks}},X_{\\mathrm{UAHs}},W_{\\mathrm{time}}=\left\\begin{bmatrix}T_{3},T_{1},T_{4},T_{2},\\cdots,T_{N_{r}}\\end{bmatrix},\\begin{bmatrix}U_{2},U_{1},U_{3},U_{2},\\cdots,U_{N_{0}}\\end{bmatrix},\\begin{bmatrix}W_{T_{3}},W_{T_{1}},W_{T_{4}},W_{T_{2}},\\cdots,W_{T_{N_{r}}}\\end{bmatrix}\\right X=Xtasks,XUAHs,Wtime=\[T3,T1,T4,T2,⋯,TNr,U2,U1,U3,U2,⋯,UN0,WT3,WT1,WT4,WT2,⋯,WTNr]
任务--无人机序列通过将任务顺序与无人机分配进行配对来表示,明确每个任务对应的执行无人机。
Y = X t a s k s , X U A H s = \[ T 3 , T 1 , T 4 , T 2 , ⋯ , T N T , U 2 , U 1 , U 3 , U 2 , ⋯ , U N U ] \begin{aligned}\mathrm{Y}&=X_{\\mathrm{tasks}},X_{\\mathrm{UAHs}}=\begin{bmatrix}\begin{bmatrix}T_3,T_1,T_4,T_2,\cdots,T_{N_T}\end{bmatrix},\begin{bmatrix}U_2,U_1,U_3,U_2,\cdots,U_{N_U}\end{bmatrix}\end{bmatrix}\end{aligned} Y=Xtasks,XUAHs=\[T3,T1,T4,T2,⋯,TNT,U2,U1,U3,U2,⋯,UNU]
EL-HH策略
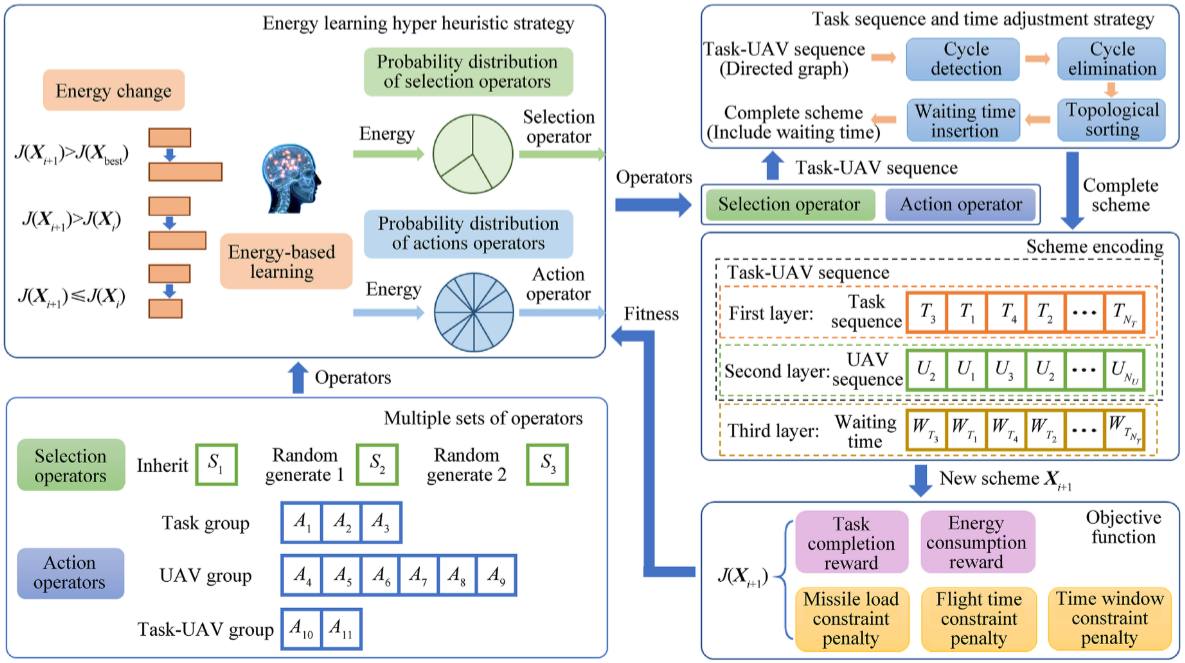
EL-HH 策略通过能量学习动态调整算子选择概率:优质算子因提升解质量而获得更高能量与选择概率,劣质算子则被抑制。算法在迭代中基于玻尔兹曼分布选择算子生成方案,并根据适应度反馈持续更新算子能量:
P k ( t ) = exp ( γ E k ( t ) ) ∑ l = 1 M exp ( γ E l ( t ) ) P_k(t)=\frac{\exp(\gamma E_k(t))}{\sum_{l=1}^M\exp(\gamma E_l(t))} Pk(t)=∑l=1Mexp(γEl(t))exp(γEk(t))
低层算子
低层算子中的选择算子用于构造初始任务--无人机序列:通过继承上一代方案保留优良解,通过满足载荷约束的随机生成增强多样性,并在此基础上引入任务顺序约束进行序列修正。
动作算子按作用层级分为任务组、无人机组和任务--无人机组,分别调整任务顺序、无人机分配及其配对关系,在不破坏已优化结构的前提下引入多样性,从而提升解空间探索效率。
任务顺序和时间调整策略
通过引入基于有向图的任务顺序调整与基于等待时间的时间调整策略,算法有效消除任务死锁并尽量满足时间窗约束。在此基础上,EL-HH 算法结合选择算子、动作算子与能量学习机制进行迭代优化,通过适应度比较与算子自适应更新,逐步生成可行且高质量的协同任务分配方案。
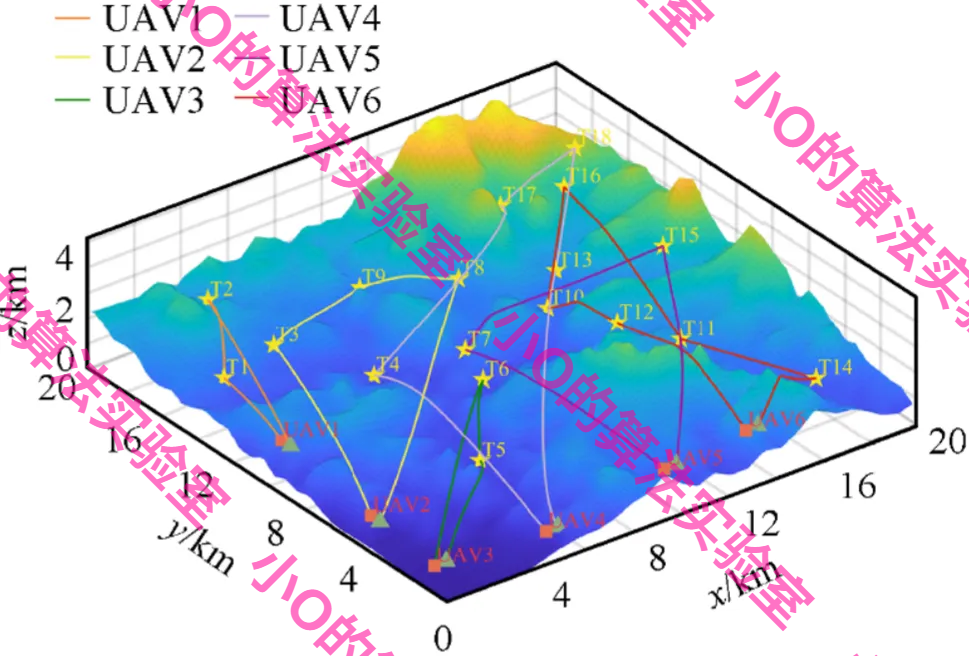
4.结果展示
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx