文章:Tracking the Unstable: Appearance-Guided Motion Modeling for Robust Multi-Object Tracking in UAV-Captured Videos
代码:暂无
单位:中国科学院光电研究所
一、问题背景:无人机跟踪为啥总"掉链子"?
无人机拍摄场景有两个核心痛点,让传统跟踪算法难以应对:
-
视角多变+运动复杂:无人机飞行时视角频繁切换(近拍变远拍、左拍变右拍),且与地面目标的相对运动剧烈,导致目标外观和位置变化极大;
-
传统方法"各自为战":现有算法大多分开处理"目标外观"和"运动轨迹"信息,忽略了两者的内在关联。一旦目标突然位移或外观模糊,就容易出现跟踪断裂、身份认错的问题。
这些问题最终导致跟踪准确率低、轨迹碎片化,严重影响无人机在安防监控、交通疏导等场景的应用效果。
二、方法创新:AMOT算法的两大"独门绝技"
研究团队提出的AMOT算法,基于联合检测与嵌入(JDE)架构,核心创新在于两个"即插即用"的模块,完美解决了传统方法的缺陷:
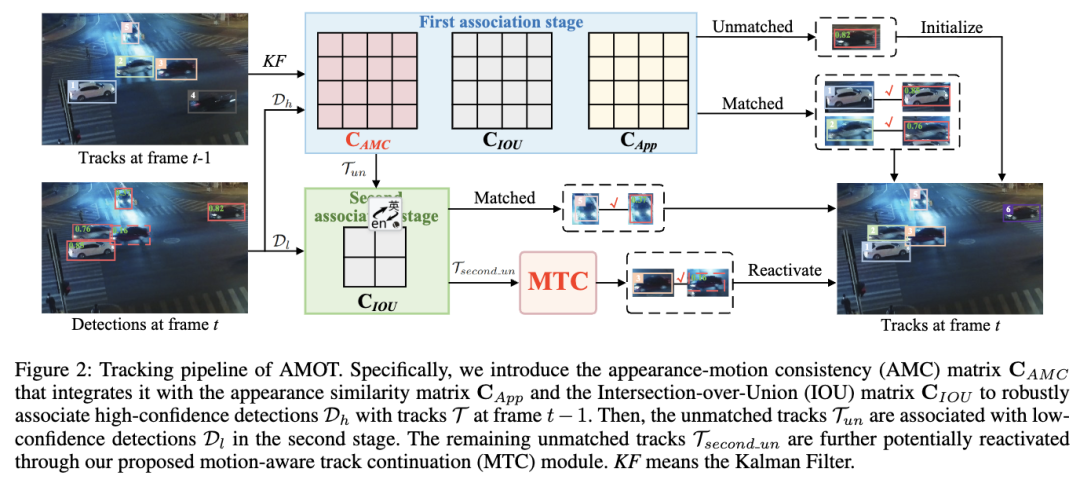
1. 外观-运动一致性矩阵(AMC):让匹配更靠谱
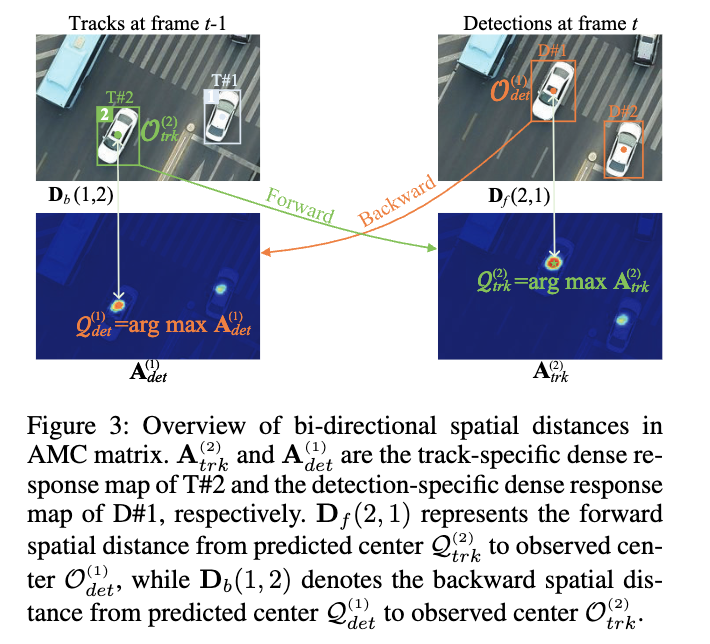
AMC矩阵不再分开看"外观"和"运动",而是通过双向空间距离计算,将两者深度融合:
-
先通过目标外观特征(ReID嵌入)生成响应图,预测目标在相邻帧的位置;
-
再计算"正向距离"(上一帧轨迹预测位置到当前帧检测位置)和"反向距离"(当前帧检测预测位置到上一帧轨迹位置);
-
只有双向距离都小时,才判定为可靠匹配,大幅减少误匹配情况。
2. 运动感知轨迹延续模块(MTC):让跟踪不中断
针对目标被遮挡、漏检导致的轨迹断裂问题,MTC模块能"复活"失联轨迹:
-
为每个轨迹维护近期状态缓存,若轨迹暂时无匹配检测,就标记为候选;
-
同时用卡尔曼滤波(运动模型)和外观特征(响应图)分别预测候选轨迹的当前位置;
-
若两个预测位置距离小于阈值,就判定目标仍在画面中,激活轨迹继续跟踪。
更实用的是,这两个模块无需额外训练,能直接集成到现有JDE类跟踪器中,兼容性拉满。
三、实验结果:三大 benchmark 全面领先
研究团队在VisDrone2019、UAVDT、VT-MOT-UAV三大无人机跟踪基准数据集上做了充分测试,结果惊艳:
-
VisDrone2019:IDF1(身份一致性指标)达61.4%,MOTA(整体跟踪准确率)达46.0%,超越MM-Tracker等主流算法;
-
UAVDT:IDF1高达74.7%,MOTA达55.1%,在鸟瞰视角场景中表现突出;
-
VT-MOT-UAV:面对复杂光照和杂乱背景,仍实现52.7%的IDF1和31.8%的MOTA,优于SORT、FairMOT等经典算法。
更关键的是,AMOT保持36.4 FPS的实时推理速度,完全满足无人机实时跟踪的需求。 ablation实验还证明,AMC和MTC模块联合使用时,能让身份切换次数大幅减少,轨迹连续性显著提升。
四、优势与局限:理性看待这项新技术
核心优势
-
鲁棒性强:能应对无人机视角多变、目标大幅位移的复杂场景,身份识别更稳定;
-
即插即用:无需重新训练,可快速集成到现有跟踪器,降低应用成本;
-
实时高效:在保证精度的同时,推理速度满足实际应用需求;
-
通用性好:在不同数据集、不同跟踪器上都能带来性能提升。
现存局限
-
依赖ReID特征质量:若目标外观极度相似(如多辆同款白色汽车),仍可能出现匹配误差;
-
阈值设置敏感:AMC的尺度因子σ和MTC的距离阈值λ需根据场景微调,缺乏自适应机制;
-
复杂遮挡应对有限:若目标长时间被严重遮挡,轨迹仍可能断裂。
五、一句话总结
AMOT通过融合外观与运动信息的AMC矩阵和轨迹复活MTC模块,解决了无人机多目标跟踪中"匹配不准""轨迹断裂"的核心痛点,为实时、稳健的无人机监控提供了高效解决方案。