目录

1.摘要
本文针对异构无人机在动态侦察与确认任务中的任务分配问题,提出了一种融合路径规划与任务分配的优化方法。研究指出,任务分配效果高度依赖于路径规划,但相关研究较为匮乏。为此,本文在基于一致性捆绑算法上进行了改进,引入了有效的多任务、多智能体约束处理机制。该方法利用Dubins路径优化耦合路径,降低预估路径与实际路径的偏差,并通过分布式遗传算法缩短执行时间。
2.问题模型
分布式任务分配
异构无人机因具备不同功能与能力,可承担多样化任务。任务分配时,仅将具备完成特定任务能力的无人机指派执行:
arg max p , d , t ∑ j = 1 N t R j ( p , d , t ) \arg\max_{p,d,t} \sum_{j=1}^{N_t} R_j(p,d,t) argp,d,tmaxj=1∑NtRj(p,d,t)
s . t . p ∈ P ( d , t ) d i j ∈ { 0 , 1 } \begin{aligned} \mathrm{s.t.}\quad & p\in P(d,t) \\ & d_{ij}\in\{0,1\} \end{aligned} s.t.p∈P(d,t)dij∈{0,1}
本文针对异构无人机任务分配问题,提出并考虑了以下关键约束:
-
单任务-单智能体约束放宽:任务可由多架无人机协同完成,每架无人机同时执行的任务数量受限。
-
机载设备约束:不同任务需匹配具备相应设备的无人机,单功能无人机仅能执行特定任务。
-
时间窗约束:无人机必须在规定的截止时间前到达任务点,否则无法分配。
-
执行时间约束:部分任务需保证足够的持续执行时间。
3.具有耦合路径扩展共识算法
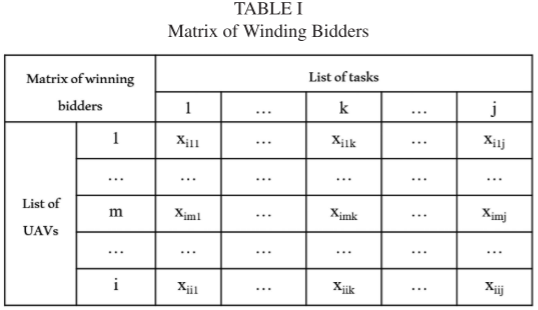
本文将传统的 单任务--单智能体(ST-SA)模型 扩展为 多任务分配模型:一架无人机可执行多个任务,一个任务也可由多架无人机协同完成。为此,引入 投标矩阵 用于记录各任务对应的多个中标无人机,从而实现灵活高效的任务分配。
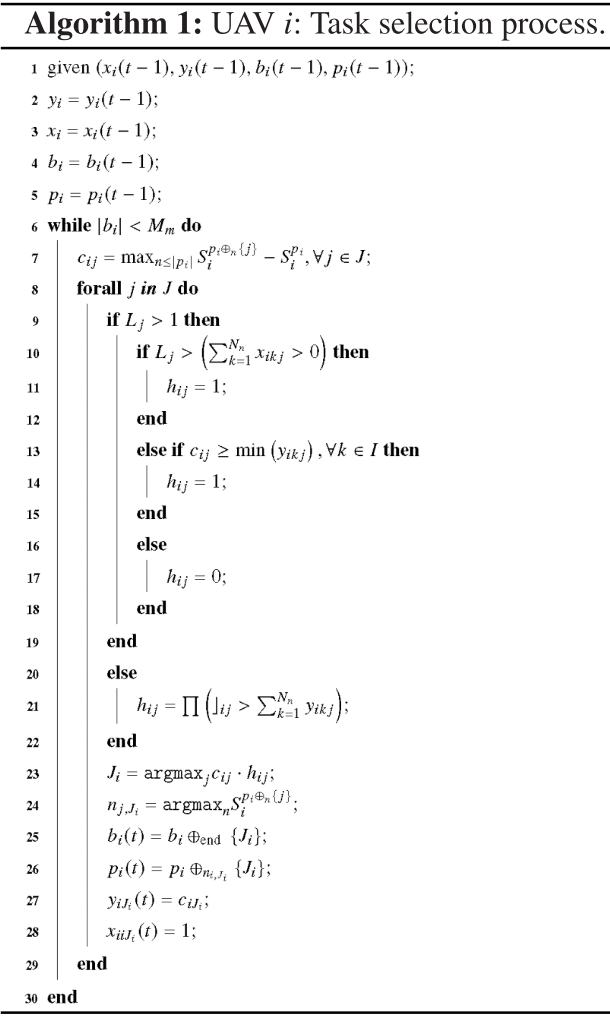
论文扩展一致性算法包括任务选择与一致性两个阶段:
- 任务选择阶段,无人机基于增量收益、时间衰减和执行成本,动态优化任务插入顺序,实现收益最大化;
- 一致性阶段,多无人机通过信息交换解决冲突,保证整体分配一致性。
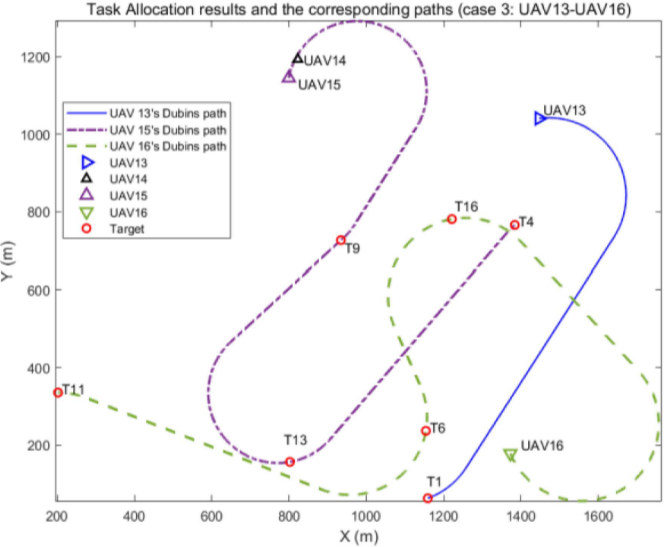
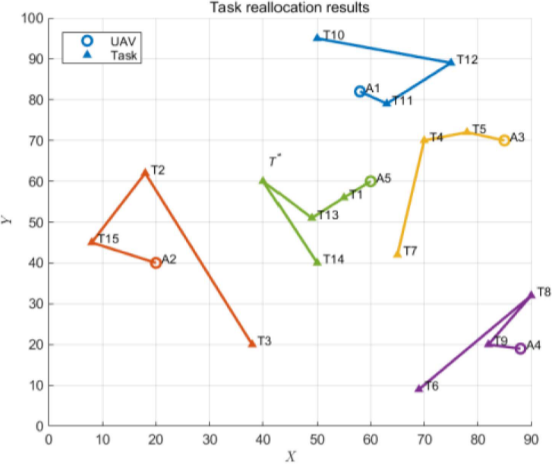
后续提出一种基于扩展一致性算法与分布式遗传算法(DGA)耦合Dubins路径规划的多无人机任务分配方法,兼顾冲突消解与路径优化,在灾害侦察与确认任务中表现出更高的效率与可靠性。
4.结果展示
5.参考文献
1 Wu W, Xu J, Sun Y. Integrate assignment of multiple heterogeneous unmanned aerial vehicles performing dynamic disaster inspection and validation task with Dubins pathJ. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 4018-4032.
6.算法辅导·应用定制·读者交流
xx